

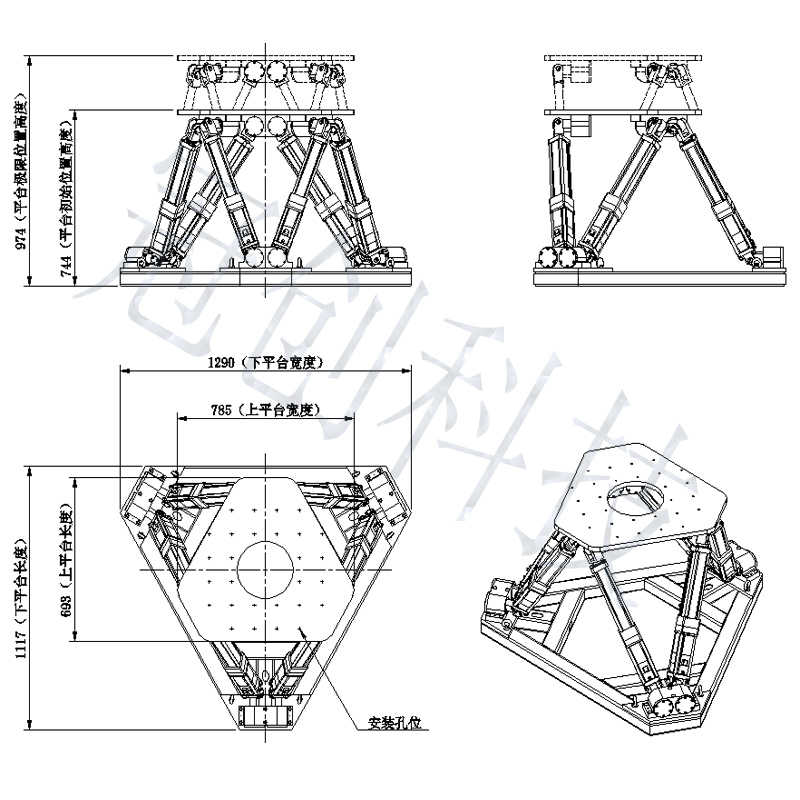
六自由度运动仿真模拟平台系统由Stewart机构的六自由
度运动平台、计算机控制系统、驱动系统等组成。六自由度
运动平台的下平台安装在地面上,上平台为运动平台,它由
六只电动缸支承,运动平台与电动缸采用六个虎克铰连接,
电动缸与固定基座采用六个虎克铰连接,六只电动缸采用伺
服电机驱动的电动缸。计算机控制系统通过协调控制电动缸
的行程,实现运动平台的六个自由度的运动,即笛卡尔坐标
系内的三个平移运动和绕三个坐标轴的转动。



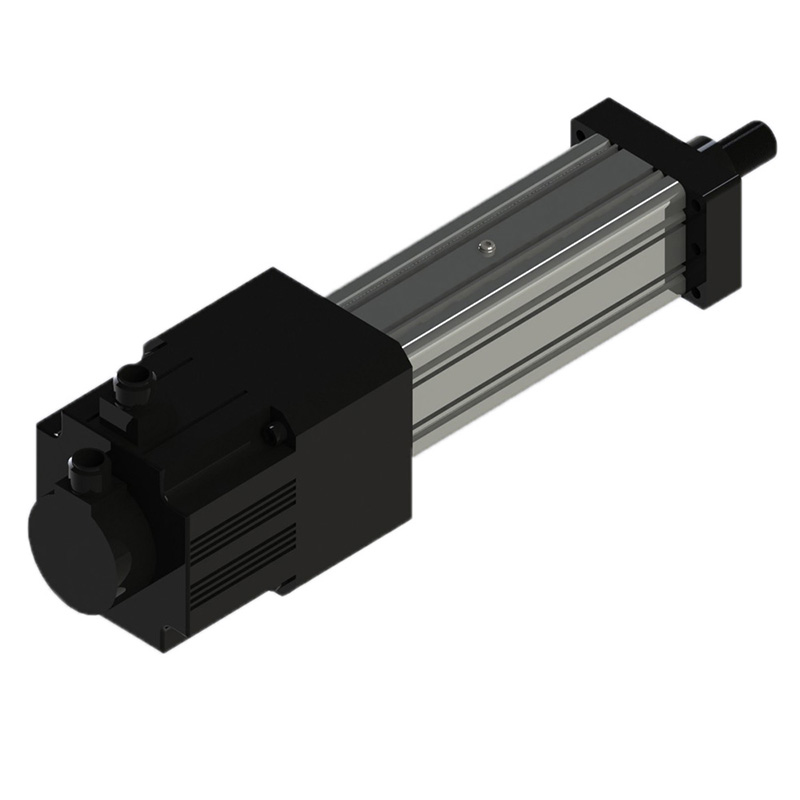
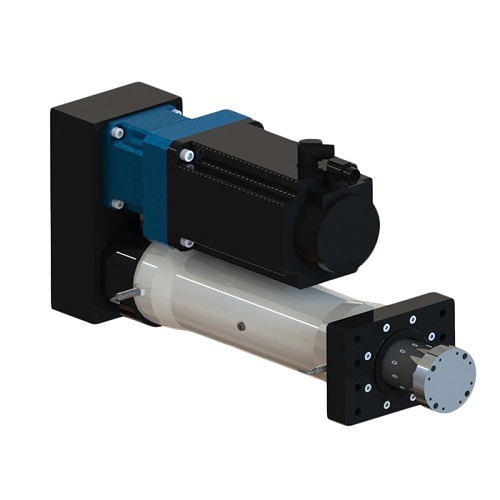
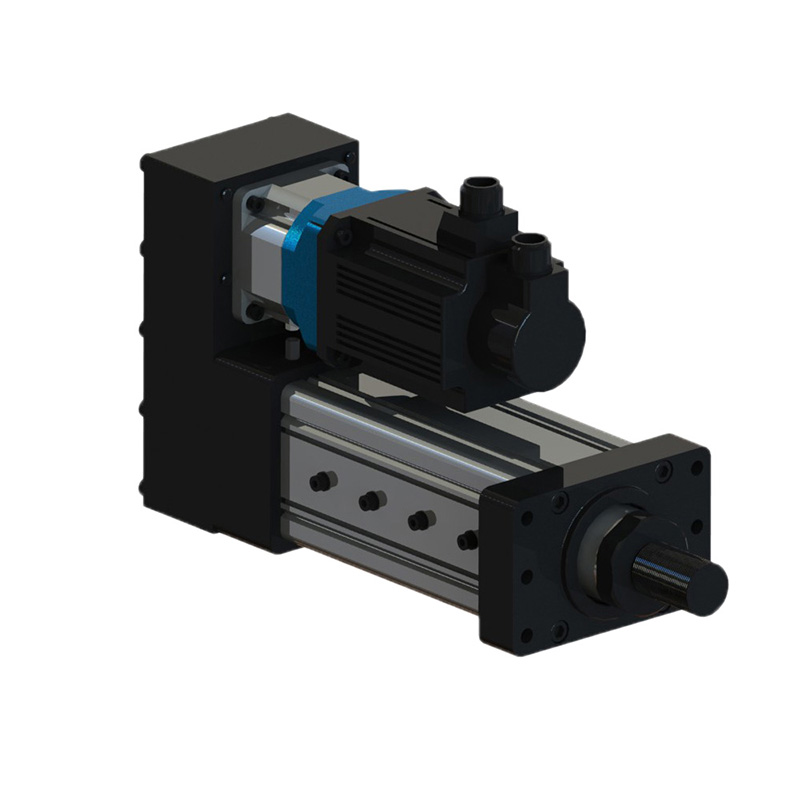
| 型号 | FGC06-021 |
| 负载 | 5.0KN |
| 速度 | 250mm/s |
| 角度 | 20度 |
| 备注 | 所有参数可根据客户要求定制 |

六自由度运动平台是用于飞行器、运动器(如飞机、车辆)模拟训练的动感模拟装置,是一种并联运动机构,它通过改变6个可以伸缩的电动缸来实现平台的空间六自由度运动(垂直向、横向、纵向、俯仰、滚转、摇摆),即X、Y、Z方向的平移和绕X、Y、Z轴的旋转运动,以及这些自由度的复合运动。
六自由度平台具有以下特点:
(1) 六自由度平台由6个缸同时支撑,与串联机构的悬臂梁相比,刚度大,结构稳定,在相同的自重或体积下有比串联机构高的承载能力;
(2) 串联机构末端件上的误差是各个关节误差的积累和放大,因而其精度低,误差大,而采用并联机构的六自由度平台没有误差积累和放大,因此误差小、精度高;
(3) 六自由度平台采用对称式结构,各向同性好;
(4) 在位置求解方面,串联机构求正解容易,但求反解十分困难,而采用并联机构的六自由度平台求正解困难,求反解却非常容易。在线实时计算时是要求反解,相比之下,并联机构容易实现。
软件部分主要包括用户界面程序、伺服算法程序、PID参数设置程序等。
电控部分的作用是接收控制系统输出的指令数据,并将其传输给伺服驱动器,驱动器将信号放大后控制电机运动,进而带动电动缸运动,并最终使台体实现各种姿态。包括工控机、运动控制卡、伺服驱动器、伺服电机、电阻尺及相关电器元件等。
机械部分用于支撑负载,包括上平台、上连接铰、下连接铰、电动缸、支撑架、底座等。平台由电动缸驱动,进行横滚、偏航、俯仰三个姿态和X、Y、Z平移共6个自由度的运动。
在六自由度平台的驱动系统中,伺服电动缸省略了中间的能量转换环节,电机直接产生力和力矩,运动过程确定高效。它具有体积小、响应灵敏、使用方便、成本低的优点,不需要复杂的管道系统。
如需特殊规格 请与本厂商联系!
-
2022-06-29
-
2022-06-24
-
2022-06-24
-
2022-06-24
-
2022-06-01
-
2022-05-25
-
2022-05-23
-
2022-05-23
-
2022-05-23
-
2022-05-19